|
1-8. СјРкРЧ ПюЕП (ЙАИЎСјРк, КёЦВИВСјРк)
(Last Updated 2004/3/31) 1. НЧЧшИёРћ
ПЉЗЏАЁСі ЙАУМРЧ СјРкПюЕПАњ КёЦВИВ СјЕПРЛ ФФЧЛХЭ РЮХЭЦфРЬНКИІ ХыЧи АќТћЧЯАэ Бз СжБтИІ УјСЄЧЯПЉ РЬЗаАЊАњ РЯФЁЧЯДТАЁИІ ШЎРЮЧбДй.
2. РЬ За
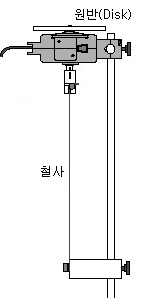
A. ЙАИЎСјРк(Physical Pendulum)
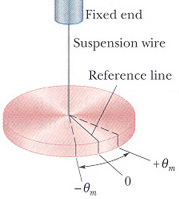
[БзИВ1] ЙАИЎСјРк |
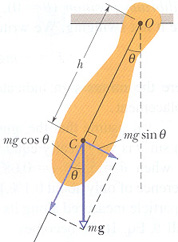
[БзИВ1]Ањ ААРЬ НЧСІ ММАшПЁМРЧ ЙАИЎСјРкПЁ ДыЧи ЙАУМИІ АУМЖѓАэ АЁСЄЧвЖЇ СњЗЎСпНЩРЛ C, АэСЄСЁРЛ O, СњЗЎСпНЩАњ АэСЄСЁ ЛчРЬРЧ АХИЎИІ h ЖѓЧЯИщ ЦђЧќЛѓХТ(Ѕш=0 РЯЖЇ) ПЁМДТ АэСЄСЁ OПЁ ДыЧи СЁ CДТ МіСїРИЗЮ ИХДоИЎАд ЕШДй.
БзЗБЕЅ, ЙАУМПЁ АЂЕЕ ЅшИИХ КЏРЇАЁ АЁЧиСіИщ СпЗТ mg ПЁРЧЧи ЙАУМПЁДТ КЙПјЗТ ХфПРХЉАЁ Л§БтАэ
Ѕѓ= -h(mg sinЅш) ----------(1)
РЬДй. ПЉБтМ - КЮШЃДТ КЙПјЗТ ХфПРХЉРгРЛ ГЊХИГЛАэ АЂЕЕ ЅшИІ 0 РИЗЮ СйРЬБт РЇЧи РлПыЧбДй. Ѕѓ= IЅс(IДТ АќМКИ№ИрЦЎ, ЅсДТ АЂАЁМгЕЕ) РЬЙЧЗЮ
Ѕѓ= I d2ЅШ/dt2 = -mgh sinЅШ---(2)
АЁ ЕШДй. ПЉБтМ СјЦјРЬ ОЦСж РлРЛЖЇ, (ЅШЁь 1 ; 5ЁЦРЬЧЯ) sinЅШЁжЅШРЬАэ
d2ЅШ/dt2 +(mgh/I )ЅШ= 0 -------------(3)
РЬЙЧЗЮ РЬ ЙЬКаЙцСЄНФРЧ ЧиДТ |
ЅШ= AcosЅјt + BsinЅјt (Ѕј=(mgh/I)1/2 )----(4)
РЬДй. t=0 РЯЖЇ УЪБтАЂРК ЅШ0 , dЅШ/dt=0 РЬЖѓ ЧЯИщ, A=ЅШ0 , B=0 РЬЙЧЗЮ
ЅШ= ЅШ0cosЅјt ---------------(5)
Ѕј=2Ѕ№f=2Ѕ№T-1 РЬЙЧЗЮ РЬ ЙАИЎСјРкРЧ СжБтДТ
 -----------(6) -----------(6)
ПЉБтМ I ДТ АэСЄСЁ(O)РЛ СіГЊДТ МіСїУрПЁ ДыЧб ЙАУМРЧ АќМКИ№ИрЦЎИІ ГЊХИГЛАэ, hДТ СњЗЎСпНЩАњ АэСЄСЁЛчРЬРЧ АХИЎИІ ГЊХИГНДй.
ИИОр АэСЄСЁРЛ СњЗЎСпНЩРИЗЮ РтДТДйИщ ЙАИЎСјРкДТ СјЕПЧЯСі ОЪДТЕЅ, РЇРЧ НФПЁМ КИДТ ЙйПЭААРЬ h Ёц0 РЬИщ СжБт T ЁцЁФАЁ ЕЧОю ЙАУМДТ КЏРЇАЁ АЁЧиСЎЕЕ СјЕПЧЯСі ОЪРНРЛ ГЊХИГЛАэ РжДй. БцРЬ LРЮ НЧ ГЁПЁ СњЗЎ(m)РЬ ИХДоЗС РжДТ ДмСјРкРЧ АцПьДТ I = mL2 , h = L РЮ АцПь РЬЙЧЗЮ (6)НФПЁМ T = 2Ѕ№(L/g)1/2 РгРЛ ОЫМіРжДй.
ПьИЎДТ РЬ НЧЧшПЁМ ЙАИЎСјРкИІ СЛДѕ ДмМјШЧЯПЉ БеРЯЧб ЙаЕЕ, РЯСЄЧб ЕЮВВРЧ ИЗДыБтПЭ ПјЙнНУЗсИІ ЛчПыЧЯПЉ ЙАИЎСјРкРЧ ПюЕПРЛ ОЫОЦКМ АЭРЬДй.
(1) ИЗДыСјРк
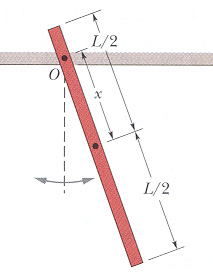
[БзИВ2] ИЗДыСјРк |
[БзИВ2]ПЭ ААРЬ БцРЬ LРЮ ИЗДыРЧ ЧбТЪ(OСЁ)РЛ АэСЄЧЯАэ РЯСЄЧб КЏРЬИІ СжОю ЙАУМИІ СјЕПНУХГЖЇ СјЕПСжБтИІ БИЧиКИРк.
ИЗДыРЧ СњЗЎРЛ m РЬЖѓ ЧЯИщ АэСЄСЁ OПЁ ДыЧб ИЗДыРЧ АќМКИ№ИрЦЎДТ
I = Ёђr 2 dm = ЅёЁђr 2 dr (Ѕё:МБЙаЕЕ) = 
РЇ РћКаРЛ АшЛъЧЯАХГЊ ЖЧДТ ЦђЧрУр СЄИЎПЁ РЧЧи
I = I O = I c.m + mh 2 =  + mx 2 = 1/12 mL 2 + mx 2 --------(7)
РЬЙЧЗЮ НФ(6) РИЗЮКЮХЭ ЙЬМвСјЕП РЯЖЇ СјРкРЧ СжБтДТ |
 ------(8)
РЬДй. Ся, РЬАЭРК БцРЬАЁ (L2+12x2)/(12x) РЮ ДмСјРкРЧ ПюЕПРИЗЮ Л§АЂЧв Мі РжДй.
(2) ПјЙнСјРк
[БзИВ3] ПјЙнСјРк |
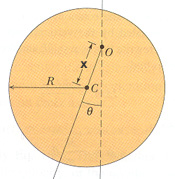
[БзИВ3]Ањ ААРЬ СпНЩ CЗЮ КЮХЭ x ИИХ ЖГОюСј СіСЁ OИІ АэСЄЧЯАэ КЏРЇИІ АЁЧвЖЇ СјЕПЧЯДТ ПјЙн ЙАИЎСјРкПЁ ДыЧи Л§АЂЧи КИРк.
ПјЙнРЧ СпНЩПЁ ДыЧб АќМКИ№ИрЦЎ I c.m = 1/2 mR2 (R:ЙнСіИЇ, m:ПјЙнСњЗЎ) РЬЙЧЗЮ, ЦђЧрУрСЄИЎПЁ РЧЧи
I = I O = I c.m + mh2 = 1/2 mR2 + mx2
РЬДй. БзЗЏЙЧЗЮ НФ(6) РИЗЮКЮХЭ ЙЬМвСјЕП РЯЖЇ СјРкРЧ СжБтДТ
 ------(9) |
РЬАЭРК БцРЬАЁ (R2+2x2)/(2x) РЮ ДмСјРкРЧ ПюЕПРИЗЮ Л§АЂЧв Мі РжДй.
B. КёЦВИВСјРк(Torsion Pendulum)
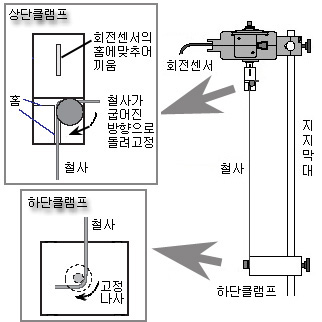
[БзИВ4]ПЭ ААРЬ ПјЦЧРЧ СњЗЎСпНЩРЛ УЖЛчЗЮ ИХДоАэ УЖЛчАЁ СіСіДыРЧ ГЁПЁ ДмДмШї АэСЄЕЧОю РжРЛЖЇ ПјЦЧРК ЦђЧќРЇФЁ(Reference line)ПЁМ СЄСіЧи РжДй.
ПјЦЧРЬ УрРЛ СпНЩРИЗЮ Ѕшm ИИХ КЏРЇАЁ АЁЧиСіИщ КёЦВИА УЖЛчПЁДТ КЙПј ШИРќЗТРЬ Л§БтАэ РЬ КЙПјШИРќЗТРК КёЦВИА АЂКЏРЇ, ЅшПЁ КёЗЪЧЯЙЧЗЮ
Ѕѓ = -ЅъЅш-------(10)
РЬДй. ПЉБтМ ЅъДТ УЖЛчРЧ ЦЏМК(БцРЬ, СїАц Ею)ПЁ АќАшЕЧДТ ЛѓМіРЬИч КёЦВИВЛѓМіЖѓ ЧбДй.
[БзИВ4] КёЦВИВ СјРк |
РЬ АшПЁ ДыЧб ПюЕПЙцСЄНФРК Ѕѓ = IЅс = Id2ЅШ/dt2 РЬЙЧЗЮ
-ЅъЅш = I d2ЅШ/dt2d2ЅШ/dt2 = -(Ѕъ/I)Ѕш---(11)
РЬДй. РЬАЭРК НКЧСИЕПЁ ИХДоИА СњЗЎРЧ ДмМјСЖШПюЕПАњ КёНСЧЯИч СїМБКЏРЇ x ЂЁ Ѕш, СњЗЎ m ЂЁ I ИІ ШћЛѓМі k ЂЁ ЅъЗЮ ДыФЁЧб АЭАњ ААДй. ЙцСЄНФ (11)РЧ ЧиДТ t=0 РЯЖЇ УЪБтАЂРЛ ЅШm РЬЖѓЧЯИщ
ЅШ= ЅШmcosЅјt -----------(12)
РЬАэ, Ѕј = 2Ѕ№f = 2Ѕ№T-1 РЬЙЧЗЮ РЬ КёЦВИВ СјРкРЧ СжБт TДТ
T = 2Ѕ№(I/Ѕъ)1/2 ---------(13) |
РЬДй. АЫЗљАшЕю ИЙРК НЧЧшБтБИЕщРЬ КёЦВИВ СјЕПАњ АќАшАЁ РжРИИч ИИРЏРЮЗТ ЛѓМі(G)ИІ УјСЄЧЯБт РЇЧб ФЋКЅЕ№НЌРЧ УЕФЊ ЕЕ КёЦВИВ СјРкИІ РЬПыЧб АЭРЬЙЧЗЮ ИХПь СпПфЧЯДй.
3. НЧЧшБтБИ Йз РхФЁ
(1) ФФЧЛХЭ Йз РЮХЭЦфРЬНК РхФЁ
(2) ШИРќМОМ(Rotary Motion Sensor; 3Дм ЕЕИЃЗЁ СїАц = АЂАЂ 10, 29, 48mm)
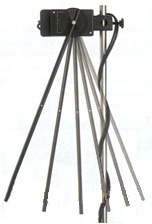
(3) ИЗДыСјРк (2СО, БцРЬ=50cm, СїАц=6mm), ПјЙнСјРк(r=10cm)
(4) A КЃРЬНК Йз СіСіИЗДы(60cm)
(5) Рк(30cm) ЖЧДТ СйРк
(6) КёЦВИВ СјРкПы УЖЛч 3СО(БцРЬ= 45.7cm, ЕЮВВ= 0.8mm, 1.2mm, 1.6mm)
(7) ШћМОМ(Force Sensor)
(8) ПјЙнЕ№НКХЉ (СњЗЎ=124g, ЙнАц=4.7cm)
(9) УЖЛч ХЌЗЅЧС (Лѓ,ЧЯ 2СО)
(10) НЧ, АЁРЇ
4. НЧЧш ЙцЙ§
A. ЙАИЎСјРк

[БзИВ5] МОМРЧ МТОї |
(1) ШИРќМОМРЧ Цљ ЧУЗЏБз ГыЖћЛі, ШцЛіРЛ МјМДыЗЮ Е№СіХЛ УЄГЮ1, 2ПЁ ПЌАсЧЯАэ, [БзИВ6]Ањ ААРЬ ШИРќМОМИІ НКХФЕхПЁ АэСЄЧбДй.
(2) ИЗДыСјРкПЁДТ БИИлРЬ ПЉЗЏАГ ЖеЗС РжДТЕЅ, ИеРњ ИЗДыРЧ СпНЩ(СњЗЎСпНЩ)РИЗЮКЮХЭ АЂ БИИлРЧ СпНЩБюСіРЧ АХИЎИІ РкЗЮ УјСЄЧЯПЉ БтЗЯЧиЕаДй.
(3) ШИРќМОМРЧ СпНЩПЁ РжДТ ГЊЛчИІ РЬПыЧЯПЉ ИЧ ГЁРЧ БИИл O1 РЛ АэСЄЧбДй. |
[БзИВ6] ЙАИЎСјРк |
 |
(4) ЕЅРЬХЭНКЦЉЕ№ПР ЧСЗЮБзЗЅРЛ НЧЧрЧЯАэ ШИРќМОМ(Rotary Motion Sensor)ИІ Е№СіХа УЄГЮ1ЗЮ ВјОюДй ГѕРИИщ [БзИВ5]ПЭ ААРЬ ЕШДй.
(5) МОМИІ ДѕКэХЌИЏ-General ХЧРЧ Sample RateРК 20Hz, Measurement ХЧРК АЂРЇФЁ(Angular Position; rad)ИІ МБХУ, Rotary Motion SensorХЧРЧ Division/Rotation(1ШИРќДч КаЧиДЩ)РК 1440РЛ МБХУ-ШЎРЮ ЧбДй.
(6) НУАЃПЁ ЕћИЅ ШИРќАЂРЧ КЏШИІ КИБтРЇЧи ОЦРЬФмРЛ ШИРќМОМОЦРЬФм РИЗЮ ВјОюАЁМ БзЗЁЧС РЉЕЕПьИІ ЖчПюДй. ПЉБтМ ЧЪПфЧЯДйИщ АЂМгЕЕ, АЂАЁМгЕЕ ЕюЕЕ МБХУЧв Мі РжДй.
(7) СјРкИЗДыИІ ДыЗЋ 5ЁЦ АЂЕЕ РЬГЛЗЮ СјЦјРЛ СжОю СјЕПНУХААэ ЛѓДмРЧ НУРлЙіЦА  РЛ ДЗЏ ЕЅРЬХИРњРхРЛ НУРлЧбДй. (ШИРќМОМДТ УЪБтАЂРЇФЁИІ 0 РИЗЮ МГСЄЧЯЙЧЗЮ СЄСіЛѓХТПЁМ ЕЅРЬХИРњРхРЛ НУРлЧб ДйРН, СјЦјРЛ СжОю СјЕПНУХАИщ МіСї ЦђЧќРЇФЁ 0 СЁПЁ ДыЧб СјЕПБзЗЁЧСИІ ОђРЛМі РжДй.) РЛ ДЗЏ ЕЅРЬХИРњРхРЛ НУРлЧбДй. (ШИРќМОМДТ УЪБтАЂРЇФЁИІ 0 РИЗЮ МГСЄЧЯЙЧЗЮ СЄСіЛѓХТПЁМ ЕЅРЬХИРњРхРЛ НУРлЧб ДйРН, СјЦјРЛ СжОю СјЕПНУХАИщ МіСї ЦђЧќРЇФЁ 0 СЁПЁ ДыЧб СјЕПБзЗЁЧСИІ ОђРЛМі РжДй.) | (8) 3~5УЪ СЄЕЕ ЕЅРЬХИИІ РњРхЧб ДйРН СЄСі  ЧЯАэ БзЗЁЧС РЉЕЕПьПЁМ ПРХфНКФЩРЯ ЧЯАэ БзЗЁЧС РЉЕЕПьПЁМ ПРХфНКФЩРЯ  ЙіЦАРЛ ДЗЏМ ХЉБтИІ КИБтССАд СЖР§ЧбДй. ЙіЦАРЛ ДЗЏМ ХЉБтИІ КИБтССАд СЖР§ЧбДй.
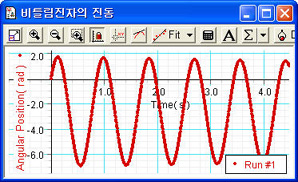
(9) НЧЧшРИЗЮКЮХЭ ОђРК ЕЅРЬХЭ АюМБПЁМ НКИЖЦЎФПМ  ЙіЦАРЛ МБХУЧЯПЉ СјРкРЧ СјЕПСжБтИІ БИЧбДй. (БзЗЁЧСИІ УцКаШї ШЎДыЧЯАэ МвМі 3ТА РкИЎБюСі БИЧЯЕЧ АЂРЇФЁАЁ 0 РЬ ЕЧДТ СжБт НУАЃАЃАнРЛ УјСЄЧЯДТАЭРЬ ПыРЬЧв АЭРЬДй) ПјЗЁДТ АЂРЇФЁАЁ 0 РЬЕЧДТ НУАЃРК АЂРЇФЁАЁ 0 ПЁ АЁБюПю ЁОЕЮ СЁРЛ КёЗЪНФРЛ РЬПыЧи АшЛъЧиОп АкСіИИ БзЗЁЧСИІ ШЎДыЧЯПЉ НКИЖЦЎФПМИІ ЛчПыЧЯИщ РЬЙЬ ФФЧЛХЭАЁ КёЗЪНФПЁ РЧЧи АшЛъЧЯПЉ РЇФЁИІ ГЊХИГЛЙЧЗЮ РЬ ДмМјЧб РлОїЕщРК Л§ЗЋЧбДй. АЂСјЦјРЬ 5ЁЦ РЬГЛ Ся, 0.087(rad) РЬГЛПЁ РжДТАЁИІ ШЎРЮЧиКИАэ СјЦјРЬ ГЪЙЋ ХЉАХГЊ ГЪЙЋ РлСі ОЪЕЕЗЯ ЕЅРЬХИИІ РњРхЧбДй. ЙіЦАРЛ МБХУЧЯПЉ СјРкРЧ СјЕПСжБтИІ БИЧбДй. (БзЗЁЧСИІ УцКаШї ШЎДыЧЯАэ МвМі 3ТА РкИЎБюСі БИЧЯЕЧ АЂРЇФЁАЁ 0 РЬ ЕЧДТ СжБт НУАЃАЃАнРЛ УјСЄЧЯДТАЭРЬ ПыРЬЧв АЭРЬДй) ПјЗЁДТ АЂРЇФЁАЁ 0 РЬЕЧДТ НУАЃРК АЂРЇФЁАЁ 0 ПЁ АЁБюПю ЁОЕЮ СЁРЛ КёЗЪНФРЛ РЬПыЧи АшЛъЧиОп АкСіИИ БзЗЁЧСИІ ШЎДыЧЯПЉ НКИЖЦЎФПМИІ ЛчПыЧЯИщ РЬЙЬ ФФЧЛХЭАЁ КёЗЪНФПЁ РЧЧи АшЛъЧЯПЉ РЇФЁИІ ГЊХИГЛЙЧЗЮ РЬ ДмМјЧб РлОїЕщРК Л§ЗЋЧбДй. АЂСјЦјРЬ 5ЁЦ РЬГЛ Ся, 0.087(rad) РЬГЛПЁ РжДТАЁИІ ШЎРЮЧиКИАэ СјЦјРЬ ГЪЙЋ ХЉАХГЊ ГЪЙЋ РлСі ОЪЕЕЗЯ ЕЅРЬХИИІ РњРхЧбДй.
(10) (8)НФ РИЗЮКЮХЭ АшЛъЕШ РЬЗаФЁ(T)ПЭ УјСЄЧб СјРкРЧ СјЕПСжБт(Te)ИІ БтЗЯЧЯАэ ПРТї(%)ИІ АшЛъЧиКЛДй. ЕЅРЬХЭБзЗЁЧСЕЕ КИАэМПЁ УЗКЮЧЯЕЕЗЯ ЧбДй.
[ЧЅ1]
|
АэСЄСЁ |
УјСЄАЊ |
РЬЗаАЊ(T) |
ПРТї(%) |
|
T1e |
T2e |
T3e |
ЦђБе(Te) |
|
O1 |
|
|
|
|
|
|
|
O2 |
|
|
|
|
|
|
|
O3 |
|
|
|
|
|
|
(11) НУЗсИЗДыИІ ДйИЅАЭРИЗЮ ЙйВйОю РЇРЧ АњСЄ (7)~(10)РЛ ЙнКЙЧЯАэ ЕЅРЬХЭ [ЧЅ1]РЛ БтЗЯЧбДй. СњЗЎРЬ ДйИЅ ЖШААРК КЮЧЧРЧ ИЗДыСјРкДТ ААРК СжБтИІ АЎДТАЁ? АЂАЂРЧ АэСЄСЁПЁ ДыЧи СјРкРЧ СжБт T1,T2,T3 РЧ ХЉБтИІ МјМДыЗЮ ГЊПЧЯИщ? СжБт TИІ xРЧ ЧдМіЗЮ БзЗСКИРк.
| [СњЙЎ] РЇРЧ ЕЮ ИЗДыСјРкПЁМ ААРК АэСЄСЁ АХИЎПЁ РжДТ СјРкРЧ СжБтИІ КёБГЧЯПЉ КИРк. СјРкРЧ СжБтДТ СњЗЎПЁ АќАшРжДТАЁ? РЯЙнРћРИЗЮ СјРкРЧ ПюЕПРК ДмМјСЖШ ПюЕПРЬ ОЦДдРЛ КИПЉЖѓ. |
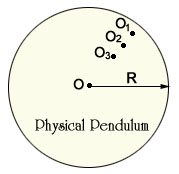
[БзИВ7] ПјЙнСјРк |
(13) ПјЙнСјРк: ПјЙнЛѓРЧ ЙйБљТЪ БИИл O1 РИЗЮКЮХЭ ОШТЪРИЗЮ АэСЄСЁРЛ РЬЕПЧиАЁИч СјРкРЧ ПюЕПРЛ АќТћЧЯАэ РЇПЭААРЬ [ЧЅ1]РЛ БтЗЯЧиКИРк.
(14) ИЗДыСјРкГЊ ПјЙнСјРкРЧ СпНЩ(СњЗЎСпНЩ)РЛ МОМПЁ АэСЄЧЯАэ ЙАУМПЁ СјЦјРЛ АЁЧЯИщ ОюЖЛАд ЕЧДТАЁ? СжБтДТ ОюЖАЧбАЁ? (ЙЋЧбДы? ЖЧДТ ПЕ?)
(15) ИЗДыСјРкПЭ ИЖТљАЁСіЗЮ АэСЄСЁРЧ РЇФЁ x РЧ КЏШПЁ ЕћИЅ СјРкРЧ СжБтАюМБРЛ БзЗСКИЖѓ. ОѓЧЭКИИщ АэСЄСЁРЧ РЇФЁАЁ ЙйБљТЪРИЗЮ РЬЕПЧвМіЗЯ СјРкРЧ БцРЬАЁ БцОюСЎ СжБтАЁ ДРЗССњАЭ ААСіИИ АсАњДТ ОюЖАЧбАЁ? |
B. КёЦВИВ СјРк

[БзИВ8] МОМРЧ МТОї |
(1) ОеРЧ НЧЧшЕЅРЬХЭИІ РњРхЧиСжАэ File => New Activity ЧЯПЉ ПоТЪ БзИВАњ ААРЬ МОМИІ ДйНУ МГСЄЧиСжАэ [БзИВ9]ПЭ ААРЬ НЧЧшРхФЁИІ ВйИчКИРк. A КЃРЬНКПЁ СіСіИЗДыИІ ММПьАэ ЧЯДмХЌЗЅЧСИІ ГЂПюДйРН, ЛѓДмПЁ ШИРќМОМИІ АэСЄЧбДй.
(2) УЖЛч(СїАц=0.8mm)ИІ ЛѓДмХЌЗЅЧСПЁ [БзИВ9]ПЭ ААРЬ АэСЄЧЯАэ ШИРќМОМ ЧЯДмПЁ ННЗЕ ШЈПЁ ИТУпОю ГЂПьАэ ЧЯДм ХЌЗЅЧСПЁ ГЊЛчЗЮ АэСЄЧбДй. РЬЖЇ УЖЛчАЁ ШжОюСіАХГЊ КЏЧќЕЧСі ОЪЕЕЗЯ ЛѓЧЯДм БцРЬИІ Рп СЖР§Чи СжАэ ГЪЙЋ ВЫ СЖРЬСі ОЪЕЕЗЯЧбДй. |
|
[БзИВ9] КёЦВИВ РхФЁРЧ МТОї
|

[БзИВ10] КёЦВИВ ЛѓМі УјСЄ |
(3) КёЦВИВЛѓМі(Ѕъ) РЧ УјСЄ
Јч ИеРњ УЖЛчПЁ ДыЧб КёЦВИВЛѓМіИІ УјСЄЧиКИРк. ШћМОМ ОЦРЬФмРЛ ДѕКэХЌИЏЧЯПЉ ЛљЧУИЕМгЕЕИІ 20Hz ЗЮ МГСЄЧЯАэ ПЕСЁ(Tare)ЙіЦАРЛ ДЗЏСиДй.
[ТќАэ]
(1) ШИРќМОМРЧ ЙцЧтБИКа: PASCOЖѓАэ НсСј КЮКаРЧ ЙнДыТЪПЁ 3ДмЕЕИЃЗЁАЁ ДоИЎАэ РЬ ЕЕИЃЗЁАЁ ПьУјРИЗЮ ЕЙОЦАЁИщ +, СТУјРК - ЗЮ ЧЅНУЕШДй.
(2) ХфПРХЉИІ БзЗЁЧСРЉЕЕПьПЁ СїСЂ ЧЅНУЧЯЗСИщ АшЛъБтРЉЕЕПь  ИІ ШАПыЧЯИщ ЕШДй. ШћМОМДТ ДчАмСњ ЖЇ -ЗЮ ЧЅНУЕЧЙЧЗЮ torque = -r * force ЧќНФРИЗЮ СЄРЧЧиСжИщ 1ЛчКаИщПЁ КИБтССАд ЧЅНУЕЩ АЭРЬДй. ИІ ШАПыЧЯИщ ЕШДй. ШћМОМДТ ДчАмСњ ЖЇ -ЗЮ ЧЅНУЕЧЙЧЗЮ torque = -r * force ЧќНФРИЗЮ СЄРЧЧиСжИщ 1ЛчКаИщПЁ КИБтССАд ЧЅНУЕЩ АЭРЬДй.
(3) УЖЛчИІ АЅОЦСжБтАЁ ЙјАХЗЮПьЙЧЗЮ АЂАЂРЧ УЖЛчПЁ ДыЧб КёЦВИВЛѓМіУјСЄ => СјЕПСжБтУјСЄ РИЗЮ НЧЧшРЛ СјЧрЧЯРк. КёЦВИВЛѓМі УјСЄ МГСЄЦФРЯАњ СјЕПУјСЄ МГСЄЦФРЯРЛ РћДчЧбРЬИЇРИЗЮ РњРхЧиСжАэ ЦФРЯ КвЗЏПРБтЗЮ НЧЧшЧЯИщ ЦэИЎЧвАЭРЬДй. |
(4) ПјЙнСњЗЎПЁ РЧЧб КёЦВИВСјЕП
Јч РЬСІ, НЧРЛ ЕЕИЃЗЁПЁ АЈОЦГѕАэ КёЦВИВСјРкРЧ ПюЕПРИЗЮКЮХЭ СжБтИІ БИЧиКИРк. ПјЙнРЛ ШИРќМОМ РЇПЁ ПУЗСГѕАэ(АЁПюЕЅ ЛчАЂШЈРЛ ИТУпОю ГЂПюДй) ГЊЛчЗЮ СЖРЮДй.
Јъ ПРХфНКФЩРЯ ЙіЦА РЛ ДЉИЃАэ АЂ РЇФЁРЧ УжДы ЖЧДТ УжМв ЛчРЬРЧ НУАЃАЃАнРЛ ОЫОЦКИБт РЇЧи НКИЖЦЎФПМ ИІ МБХУЧЯПЉ СјРкРЧ СјЕПСжБт АЊРЛ 5АГСЄЕЕ УјСЄЧбДй.(МвМі 4ТАРкИЎ БюСі УјСЄ-БзЗЁЧСИІ УжДыЧб ШЎДыЧЯДТ АЭРЬ РЏИЎ.
[ТќАэ] БтСиСЁПЁ НКИЖЦЎФПМ ЧЅНУИІ ГѕАэ Бз КЮБйПЁМ ФПМАЁ ЛяАЂЧќАњ Ме ЧЅНУ  АЁ ГЊХИГЏ ЖЇ ХЌИЏ-ЕхЗЁБзЧЯИщ НУАЃАЃАнРЬ ЧЅНУЕШДй) ЦђБеЧЯПЉ СжОюСј УЖЛчПЁ ДыЧб КёЦВИВ СјЕПСжБт АЊРЛ БтЗЯЧЯАэ, Е№НКХЉРЧ СњЗЎАњ ЙнАц УјСЄПЁ РЧЧб АќМКИ№ИрЦЎ РЬЗаАЊ I ИІ БИЧЯАэ T = 2Ѕ№(I/Ѕъ)1/2 ЗЮКЮХЭ АшЛъЕШ РЬЗаФЁПЭ УјСЄЧб СјРкРЧ СјЕПСжБт ЛчРЬРЧ ПРТї(%)ИІ АшЛъЧиКЛДй. АЁ ГЊХИГЏ ЖЇ ХЌИЏ-ЕхЗЁБзЧЯИщ НУАЃАЃАнРЬ ЧЅНУЕШДй) ЦђБеЧЯПЉ СжОюСј УЖЛчПЁ ДыЧб КёЦВИВ СјЕПСжБт АЊРЛ БтЗЯЧЯАэ, Е№НКХЉРЧ СњЗЎАњ ЙнАц УјСЄПЁ РЧЧб АќМКИ№ИрЦЎ РЬЗаАЊ I ИІ БИЧЯАэ T = 2Ѕ№(I/Ѕъ)1/2 ЗЮКЮХЭ АшЛъЕШ РЬЗаФЁПЭ УјСЄЧб СјРкРЧ СјЕПСжБт ЛчРЬРЧ ПРТї(%)ИІ АшЛъЧиКЛДй.
| Јы ЕЮВВ= 1.2mm, 1.6mm УЖЛч Сп 1АГИІ МБХУЧЯПЉ РЇРЧ НЧЧшРЛ ЕЧЧЎРЬ ЧиКИАэ СжБтПЭ СјЦј БзИЎАэ УЖЛч ЕЮВВПЭ АЈМтСјЕП ЛчРЬРЧ АќАшИІ МГИэЧиКИРк. (ГЪЙЋ ЛЁИЎ СјЕПЧЯИщ ЛљЧУИЕМгЕЕИІ 500Hz СЄЕЕЗЮ ГєПЉСиДй)
5. Тќ Аэ
(1) Torsion Pendulum (PDF ЦФРЯ)
(2) РЯЙнРћ СјРкРЧ СжБтАјНФ / ММЛѓПЁМ АЁРхКќИЅ СјРк
(3) ИИРЏРЮЗТЛѓМі(G) УјСЄНЧЧш (ФЋКЅЕ№НЌ НЧЧш)
|


 НЧЧшНЧМвАГ
НЧЧшНЧМвАГ БЙСІФЗЦлНК
БЙСІФЗЦлНК



 1.
1.