|
|
1-3. РЯАњ ПЁГЪСі
(Last Updated 2016/2/29)
1. НЧЧшИёРћ
ЙАУМПЁ РЯСЄЧб Шћ(ЖЧДТ КвБдФЂЧб Шћ)РЛ АЁЧиМ РЯСЄЧб СіСЁБюСі МіЧрЕШ РќУМ РЯРК УжСО СіСЁПЁМРЧ ЙАУМРЧ ПюЕППЁГЪСіРЧ КЏШЗЮ ГЊХИГВРЛ РЬЧиЧбДй. ЖЧ, ЙАУМАЁ УцЕЙЧв ЖЇ АшРЧ ПюЕПЗЎРК КИСИЕЧИч АЁЧиСј УцАнЗЎРК ПюЕПЗЎРЧ КЏШПЭ ААРНРЛ РЬЧиЧЯАэ НЧЧшРћ АќАшНФАњ РЬЗаНФРЬ РЯФЁЧЯДТАЁИІ ОЫОЦКЛДй.
2. РЬ За
[БзИВ1] ЙАУМПЁ АЁЧиСј РЯ |
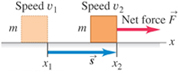
ПмЗТПЁРЧЧи ЙАУМПЁ АЁЧиСј Уб РЯРК ЙАУМРЧ КЏРЇ, Ся РЇФЁКЏШПЁ АќАшЕЧСіИИ ЙАУМРЧ МгЕЕКЏШПЁЕЕ АќАшЕШДй. СњЗЎ mРЧ ЙАУМАЁ РЯСЄЧб ОЫТЅШћ(net force), FРЧ РлПыЧЯПЁ [БзИВ1]Ањ ААРЬ xУрРЛ ЕћЖѓ ПђСїРЬДТ АцПьИІ Л§АЂЧиКИРк. РЬ ЙАУМДТ ДКЦАРЧ СІ2Й§ФЂПЁРЧЧи РЯСЄЧб КЏРЇ s = x2- x1 ЕПОШ v1 ПЁМ v2 ЗЮ АЁМгЕШДйИщ v22 = v12 + 2as , F = ma АќАшНФРИЗЮКЮХЭ ЙАУМПЁ АЁЧиСј РЯРК
Fs = = 1/2 mv22 - 1/2 mv12 |
РИЗЮ ОЕ Мі РжДй. Аі FsДТ ОЫТЅШћ, FПЁ РЧЧи ЙАУМПЁ АЁЧиСј Уб РЯРЬАэ 1/2 mv2 РК ЙАУМРЧ ПюЕППЁГЪСі, K ЖѓАэ СЄРЧЧЯИщ Уб РЯ, W ДТ ДйРНАњ ААРЬ ГЊХИГО Мі РжДй.
 --------(2) 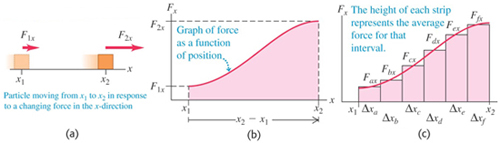 [БзИВ2] КЏШЧЯДТ ШћРЬ Чб РЯ(ch6,192p) [БзИВ2] КЏШЧЯДТ ШћРЬ Чб РЯ(ch6,192p)
Ся, [БзИВ2]ПЭ ААРЬ АшПЁ АЁЧиСј Уб РЯРК ОЫТЅШћДы РЇФЁРЧ БзЗЁЧСПЁМ АюМБ ЧЯДмРЧ ИщРћРИЗЮМ АсСЄЕЩ Мі РжДй.
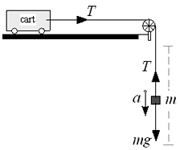
[БзИВ3] РхЗТРЬ Чб РЯ |
РЬСІ [БзИВ3]Ањ ААРЬ ФЋЦЎАЁ ЕЕИЃЗЁИІ ХыЧи ИХДоИА СњЗЎПЁРЧЧи МіЦђ ЦЎЗЂРЛ ЕћЖѓ СйЗЮ ДчАмСіДТ АцПьИІ Л§АЂЧи КИРк.
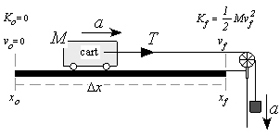
ФЋЦЎДТ РхЗТ, TПЁ РЧЧи АЁМгПюЕПРЛ Чв АЭРЬДй. ФЋЦЎДТ КЏРЇЅФx ИІ РЬЕПЧЯИч СЄСі ЛѓХТЗЮКЮХЭ УжСОМгЗТ vf БюСі СѕАЁ Чв АЭРЬДй.
ИЖТћРЬ ОјДйАэ АЁСЄЧЯИщ СйРЧ РхЗТРК ФЋЦЎИІ АЁМгНУХАДТ ОЫТЅШћРЬАэ ФЋЦЎПЁ АЁЧиСј РЯ(Wcart)РК И№ЕЮ ФЋЦЎРЧ ПюЕППЁГЪСі(ЅФKcart)ЗЮ КЏШЏЕЧАэ ДйРНАњ ААДй.
Wcart = T•ЅФx = ЅФK cart ---(3) |
[БзИВ4] СпЗТРЬ Чб РЯ |
ФЋЦЎАЁ МіЦђРИЗЮ ПђСїРЬДТ ЕПОШ ИХДоИА СњЗЎРК МіСїРИЗЮ ПђСїРЬЙЧЗЮ ФЋЦЎПЭ СњЗЎРК РгРЧРЧ МјАЃПЁ ААРК МгЗТ, ААРК АЁМгЕЕ, ААРК КЏРЇИІ АЎДТДй.
БзЗЏГЊ, ИХДоИА СњЗЎРК (СпЗТРћ) РЇФЁПЁГЪСіПЭ ПюЕППЁГЪСіИІ И№ЕЮ АЎАэ СњЗЎРЬ ЖГОюСіДТ ЕПОШ РхЗТАњ СпЗТРЬ И№ЕЮ РЯЧЯАэ РжРНПЁ РЏРЧЧЯРк.
ИХДоИА СњЗЎПЁ ДыЧи СпЗТРЬ Чб РЯРК
Wgravity = mg•ЅФx ---(4)
РЬАэ РЬАЭРК АЈМвЧб РЇФЁПЁГЪСіРЧ ХЉБтПЭ ААДй.
ЅФU = -Wgravity ---(5) |
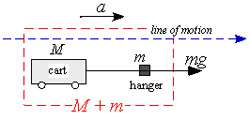
[БзИВ5] КЙЧеАшРЧ АЁМгЕЕ |
РЬ КЙЧеАш(coupled system)ДТ СњЗЎ, (M+m)РЧ Чб ЙАУМАЁ Шћ, mgПЁ РЧЧи СїМБПюЕПРИЗЮ АЁМгЕЧОю АЁМгЕЕ aЗЮ ПђСїРЬДТ АцПьЗЮ ДмМјШ Чв Мі РжДй. АшРЧ АЁМгЕЕИІ БИЧиКИИщ, ЂВF = (M+m)a, mg = (M+m)a, Ся,
a = m/(M+m) g
РЯ-ПЁГЪСі РЬЗаПЁ РЧЧи РЬ КЙЧеАшРЧ ПюЕППЁГЪСі КЏШДТ ДйРНАњ ААДй.
| WTotal = -ЅФUhanger = ЅФKsystem--------(6) | | РЬАЭРК ПЊЧаРћ ПЁГЪСі КИСИЙ§ФЂ(The Law of Conservation of Mechanical Energy)РЛ ГЊХИГНДй. (Дм, ШћРЧ МеНЧРЬ ОјДйАэ АЁСЄ) Ся, ОюЖВ АшПЁМ РЇФЁПЁГЪСі(Potential Energy)РЧ КЏШАЁ СјЧрЕЩ ЖЇ, ПюЕППЁГЪСі(Kinetin Energy)ДТ БзПЁ ДыРРЧЯПЉ ЙнДыКЏШАЁ РЯОюГДй. РЬ АцПь, АшРЧ ЧбКЮКа, ИХДоИА СњЗЎРК ДмСі МіСїРИЗЮ ПђСїРЬИч (СпЗТРћ)РЇФЁПЁГЪСіАЁ КЏШЧЯСіИИ АшРЧ И№Еч КЮКаПЁМ ПюЕППЁГЪСі КЏШАЁ РЯОюГДй.
ПьИЎДТ РЬ НЧЧшПЁМ СїМБЦЎЗЂ РЇПЁ ФЋЦЎИІ ПУЗСГѕАэ (ФЋЦЎПЁ ШћМОМИІ АэСЄ) ЧбТЪ ГЁПЁДТ ЕЕИЃЗЁ(ШИРќМОМ ЖЧДТ ЕЕИЃЗЁПЭ ЦїХфАдРЬЦЎ)ИІ МГФЁЧЯПЉ ФЋЦЎПЭ ЧрАХИІ НЧЗЮ ПЌАсЧб ДйРН, ЧрАХАЁ СЄСіЛѓХТЗЮКЮХЭ ГЋЧЯЧвЖЇ ЧрАХРЧ РЇФЁПЁГЪСіАЁ Аш(ФЋЦЎПЭ ЧрАХ)РЧ ПюЕППЁГЪСіЗЮ РќШЏЕЧДТ АЭРЛ АќТћЧЯАэ РЯАњ ПЁГЪСі АќАшИІ СЄЗЎРћРИЗЮ ОЫОЦ КМ АЭРЬДй.
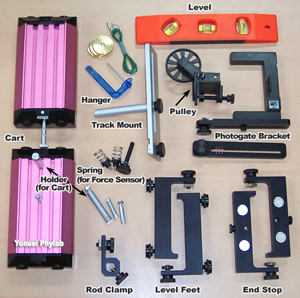
3. НЧЧшБтБИ Йз РхФЁ
(1) ФФЧЛХЭ Йз РЮХЭЦфРЬНК РхФЁ
(2) СїМБЦЎЗЂ(1.2m)
(3) РЯТїПјПюЕП НЧЧшРхФЁ ММЦЎ
|
-ФЋЦЎ(Ор 500g) 2АГ,
-РкБтЙќЦл(End Stop) 2АГ
-ЦЎЗЂИЖПюЦЎ(Track Mount)
-ШІДѕ, НЧДоИА УпАЩРЬ(5g), СњЗЎ(20gx3АГ) |
|
[БзИВ7] РЯТїПјПюЕП НЧЧш КЮЧАММЦЎ |
4. НЧЧшЙцЙ§(БЧРх)
 [БзИВ8] РЯАњПЁГЪСі НЧЧшРхФЁ [БзИВ8] РЯАњПЁГЪСі НЧЧшРхФЁ
(1) [БзИВ8]Ањ ААРЬ ИеРњ СїМБЦЎЗЂ ЧЯДмПЁ МіЦђЙп(Level Feet)РЛ МГФЁЧЯАэ(НЧЧш ЦэРЧЛѓ ЕкТЪРИЗЮ ГЊЛчИІ СЖПЉСиДй) ИЗДы МіЦђАш(level)ИІ ПУЗСГѕАэ МіЦђЙп ЧЯДмРЧ ГЊЛчИІ РЬПыЧЯПЉ ЦЎЗЂРЧ МіЦђРЛ Рп СЖСЄЧбДй.
[МіЦђСЖСЄ ТќАэ]
МіЦђАш ГЛРЧ 3АГРЧ БтЦїАЁ СЄСпОгПЁ ПРЕЕЗЯ ЧиОпЧЯИч МіЦђЙп ГЊЛчДТ ЧЯДмПЁМ РЇИІ КМЖЇ ПьУјРИЗЮ ЕЙИЎИщ СЖПЉСіЙЧЗЮ ГЛЗСАЁАэ СТЗЮ ЕЙИЎИщ ЧЎИЎИщМ ЦЎЗЂРЛ ПУИАДй. |
(2) ПьУјПЁ ИеРњ УјИщ ШЈРЛ РЬПыЧЯПЉ РкБтЙќЦл(End Stop; РкМЎРЛ ГЛРх, ЙнЙпЗТРЛ РЬПыЧЯПЉ ФЋЦЎАЁ НКЧСИЕ ОјРЬЕЕ КЮЕхЗДАд ЦЈАм ГЊАЅ Мі РжРН)ИІ ГЂПі АэСЄЧЯАэ ЦЎЗЂИЖПюЦЎИІ РЬПыЧЯПЉ ШИРќМОМ(RMS)ИІ МГФЁЧЯАэ РЮХЭЦфРЬНК УЄГЮ1,2ПЁ ГыЖћ,ЦФЖћ МјМЗЮ ПЌАсЧиСиДй. (1)~(2) АњСЄРК РЬЙЬ ЕЧОюРжРЛ Мі РжРН
[БзИВ8-1] ФЋЦЎПЁ ШћМОМ АэСЄЧЯДТ ЙцЙ§ |
(3) [БзИВ8-1]Ањ ААРЬ ФЋЦЎ ЛѓДмПЁ ШћМОМИІ АэСЄ(ШІДѕГЊЛчИІ ОрАЃЧЎАэ ФЋЦЎЛѓДм ШЈПЁ ГЂПіМ ГЊЛчИІ СЖПЉСжИщ ИЗДыАЁ АэСЄЕЪ)ЧЯАэ РќРкРњПя(0.01~2kg; НЧЧшНЧ ОеТЪПЁ АјПыРИЗЮ КёФЁ)РЛ РЬПыЧЯПЉ ФЋЦЎПЭ ШћМОМРЧ СњЗЎРЛ УјСЄЧЯАэ БтЗЯЧбДй.
ЦЎЗЂРЇПЁ ФЋЦЎИІ ПУЗС ГѕОвРЛЖЇ СЄСіЛѓХТПЁМ ФЋЦЎАЁ ПђСїРЬИщ ДйНУ МіЦђАшПЭ МіЦђЙп ГЊЛчИІ РЬПыЧЯПЉ СжРЧБэАд МіЦђРЛ СЖСЄЧи СжОюОп ЧбДй.
(4) НЧ(1m СЄЕЕ БцРЬЗЮ РкИЇ) ОчТЪРЛ ИХЕьРЛ ИИЕщОю ЧбТЪРК ШћМОМРЧ АэИЎПЁ АЩАэ ЧбТЪРК УпАЩРЬПЁ ПЌАс, ШИРќМОМРЧ ХЋ ЕЕИЃЗЁПЁ ИХДоОвРЛЖЇ НЧРЬ ЦЎЗЂПЁ МіЦђРЬ ЕЧЕЕЗЯ ШИРќМОМРЧ РЇФЁИІ Рп СЖСЄЧбДй.
|

[БзИВ9] МОМРЧ МТОї |
(5) ЕЅРЬХЭНКЦЉЕ№ПР ЧСЗЮБзЗЅРЛ НЧЧрЧЯАэ УЄГЮ1ПЁДТ ШИРќМОМ(RMS; Rotary Motion Sensor), УЄГЮA ПЁДТ ШћМОМИІ АЂАЂ МГФЁЧи СжИщ [БзИВ9]ПЭ ААРЬ ЕШДй.
(6) ШИРќМОМ МГСЄ: ШИРќМОМ ОЦРЬФмРЛ ДѕКэХЌИЏ, General ХЧРЧ Sample RateРК 50Hz, Measurement ХЧРК РЇФЁ,(Position, m)ПЭ МгЗТ(velocity, m/s)ИІ МБХУ, Rotary Motion SensorХЧРЧ Division/Rotation(1ШИРќДч КаЧиДЩ)РК 1440, Linear CalibrationРК Large Pulley(Groove) ИІ МБХУ, ШЎРЮ ЧбДй. | (7) ШћМОМ МГСЄ: ШћМОМ ОЦРЬФмРЛ ДѕКэХЌИЏЧЯПЉ ЛљЧУИЕ МгЕЕДТ 50Hz СЄЕЕЗЮ МГСЄЧЯАэ Calibration ХЧПЁМ ПЕСЁ(Tare)ЙіЦАРЛ ДЗЏСжИщ Current ReadingРЬ 0РЬ ЕЪРЛ ШЎРЮЧЯАэ, СњЗЎ 45g(УпАЩРЬЦїЧд)РЛ СїСЂ ШћМОМПЁ ИХДо АцПь Ор 0.44(N)РЛ ЧЅНУЧЯИч СЄЛѓ РлЕПЧЯДТАЁИІ ШЎРЮЧбДй. ЖЧ, High Value +50РЛ -50РИЗЮ Low Value -50РЛ +50РИЗЮ ЙйВйАэ ШЎРЮРЛ ДЗЏСжИщШћМОМАЁ ДчАмСњ ЖЇ + ЗЮ ЧЅНУЕЧОю БзЗЁЧСПЁ ГЊХИГЊЙЧЗЮ ЦэИЎЧв АЭРЬДй.
[АшЛъБт РЉЕЕПьРЧ ШАПы]
* ЙАЗа, ФЋЦЎРЧ РЇФЁПЭ МгЕЕ, СйРЧ РхЗТ ЕЅРЬХЭ Ею, ЧЪПфЧб АЭИИ УјСЄЧЯПЉ НЧЧшРЛ МіЧрЧв Мі ЕЕ РжАкРИГЊ АшЛъНФРЛ СЄРЧЧиСжИщ ПюЕППЁГЪСіГЊ РЇФЁПЁГЪСі Ею, ДмМј ЙнКЙ АшЛъЕщЕЕ ОЦПЙ НЧЧшРЛ МіЧрЧЯИч ЙйЗЮ ШЏЛъ, БзЗЁЧСЗЮ ЧЅНУЧв Мі РжДй.
Јч  АшЛъБт ЙіЦАРЛ ХЌИЏЧЯПЉ ОЦЗЁПЭ ААРЬ РдЗТЧЯИщ ФЋЦЎРЧ ПюЕППЁГЪСіИІ БзЗЁЧСЗЮ ЙйЗЮ ЧЅНУЧв Мі РжДй. АшЛъБт ЙіЦАРЛ ХЌИЏЧЯПЉ ОЦЗЁПЭ ААРЬ РдЗТЧЯИщ ФЋЦЎРЧ ПюЕППЁГЪСіИІ БзЗЁЧСЗЮ ЙйЗЮ ЧЅНУЧв Мі РжДй.
 [БзИВ10] АшЛъБтРЧ ШАПы(ФЋЦЎРЧ ПюЕППЁГЪСі,Kcart СЄРЧ) [БзИВ10] АшЛъБтРЧ ШАПы(ФЋЦЎРЧ ПюЕППЁГЪСі,Kcart СЄРЧ)
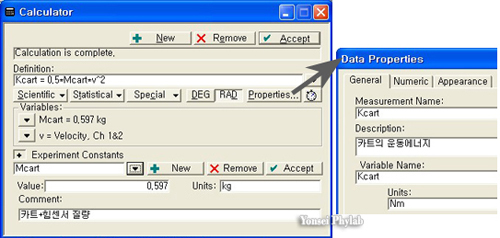
Јш РдЗТРЬ И№ЕЮ ГЁГ ШФПЁДТ ЙнЕхНУ Accept ЙіЦАРЛ ДЗЏСжАэ РЉЕЕПьИІ ДнРИИщ Data МНМЧ(СТУјЛѓДм)ПЁ АшЛъНФРЬ ГЊХИГВРЛ КМ Мі РжДй. (ЧСЗЮБзЗЅ ЛчПыЙ§ПЁ ДыЧиМ ЙЬИЎ РЭЧєЕЮЕЕЗЯ ЧбДй)
Јщ ДйИЅ АшЛъНФРЛ РдЗТЧЯАэ НЭРЛ ЖЇ ДйНУ 'calculate' ЙіЦАРЛ ХЌИЏЧЯИщ РќПЁ РдЗТЧб НФРЬ ГЊХИГЊДТЕЅ РЬ ЛѓХТПЁМ ЙнЕхНУ +New ЙіЦАРЛ ХЌИЏЧЯАэ ЛѕЗЮ РдЗТ(ОШ ДЉИЃАэ ЛѕЗЮПю НФРЛ РдЗТ, AcceptИІ ДЉИЃИщ РќПЁ РдЗТЧб НФРЬ СіПіСіЙЧЗЮ СжРЧ!)РЛ НУРлЧбДй. (НЧЧшЛѓМіИІ ПЉЗЏАГ РдЗТЧв АцПьПЁЕЕ ЛѓМіРЬИЇ ПЗРЧ +New ЙіЦАРЛ ДЗЏСжОюОп Чд) |
(8) ФЋЦЎПЁ РлПыЧЯДТ ШћАњ ПђСїРЮ АХИЎИІ БзЗЁЧСЗЮ КИБтРЇЧи  БзЗЁЧС ОЦРЬФмРЛ ШћМОМ ОЦРЬФмРИЗЮ ВјОюАЁМ БзЗЁЧСИІ ЖчПюДйРН, xУрРЛ t ДыНХ poisition(m) РИЗЮ ЙйВуСжИщ(УрРЬИЇПЁМ ИЖПьНКИІ ХЌИЏЧЯИщ ПЉЗЏ АЁСі КЏМі Сп МБХУАЁДЩ) [БзИВ11]РЧ СТУјАњ ААРК БзЗЁЧСРЉЕЕПьАЁ ИИЕщОюСјДй. БзЗЁЧС ОЦРЬФмРЛ ШћМОМ ОЦРЬФмРИЗЮ ВјОюАЁМ БзЗЁЧСИІ ЖчПюДйРН, xУрРЛ t ДыНХ poisition(m) РИЗЮ ЙйВуСжИщ(УрРЬИЇПЁМ ИЖПьНКИІ ХЌИЏЧЯИщ ПЉЗЏ АЁСі КЏМі Сп МБХУАЁДЩ) [БзИВ11]РЧ СТУјАњ ААРК БзЗЁЧСРЉЕЕПьАЁ ИИЕщОюСјДй.
(9) ДйНУ БзЗЁЧС ОЦРЬФмРЛ ШИРќМОМ ОЦРЬФмРИЗЮ ВјОюАЁМ БзЗЁЧСИІ ЖчПюДйРН, xУрРЛ t ДыНХ Kcart ЗЮ ЙйВуСиДй.(БзИВ11РЧ ПьУј БзЗЁЧС ТќСЖ) СТУјЧЯДмПЁ Graph1, Graph2 ЕюРИЗЮ ГЊХИГЊДТ БзЗЁЧС СІИёРЛ 'ФЋЦЎПЁ Чб РЯ' 'ФЋЦЎРЧ ПюЕППЁГЪСі' ЕюРИЗЮ РћОюСжИщ БзЗЁЧСИІ ЦэИЎЧЯАд БИКаЧв Мі РжДй.
(10) 40g СњЗЎРЛ УпАЩРЬПЁ ИХДоАэ УпАЩРЬАЁ УжЛѓДмПЁ РжРЛ ЖЇ НЧРЬ ДчАмСіСі ОЪРК ЛѓХТПЁМ ШћМОМРЧ ПЕСЁЙіЦАРЛ ДйНУЧбЙј ДЗЏСжАэФЋЦЎИІ ГѕРНАњ ЕПНУПЁ НУРлЙіЦА  РЛ ДЗЏ НЧЧшРЛ МіЧрЧбДй. (ШИРќМОМДТ УЪБт (АЂ)РЇФЁИІ 0 РИЗЮ РЮНФЧЯЙЧЗЮ ФЋЦЎАЁ РЬЕПЧб АХИЎИІ НБАд ОЫ Мі РжДй) РЛ ДЗЏ НЧЧшРЛ МіЧрЧбДй. (ШИРќМОМДТ УЪБт (АЂ)РЇФЁИІ 0 РИЗЮ РЮНФЧЯЙЧЗЮ ФЋЦЎАЁ РЬЕПЧб АХИЎИІ НБАд ОЫ Мі РжДй)
(11) ФЋЦЎАЁ ГЁПЁМ КЮЕњФЅ ЖЇ ЕЅРЬХЭАЁ ИХПь СіСЎКаЧЯЙЧЗЮ([СжРЧ]ПьУј ГЁПЁМ ФЋЦЎАЁ ЙйДкПЁ ЖГОюСіСі ОЪЕЕЗЯЧбТЪПЁМ РтОЦСиДй) ЕЅРЬХЭАЁ БњВ§ЧЯАд ГЊПРСі ОЪРЛ АцПь, ОЦЗЁРЧ ГЛПыРЛ ТќАэЧЯПЉ НЧЧшРЛ ЙнКЙ, МіЧрЧЯИщ [БзИВ11]Ањ ААРК ЕЅРЬХЭИІ ОђРЛ Мі РжДй.
[БзИВ10-1] РкЕПСЄСі МГСЄ |
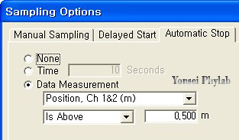
[ТќАэ]
(1) ФЋЦЎАЁ ЦЎЗЂ ГЁПЁ ЕЕТјЧЯДТ ДыЗЋРЧ РЇФЁИІ КИАэ [БзИВ10-1]Ањ ААРЬ РкЕПСЄСі ПЩМЧРЛ ЛчПыЧЯИщ ЦэИЎЧв АЭРЬДй.  'Option' ЙіЦАРЛ ХЌИЏЧЯАэ Automatic Stop ХЧПЁМ Data ЖѕРЛ МБХУЧЯАэ Position-Is AboveИІ МБХУ, 0.5m ЕюРИЗЮ РдЗТЧЯИщ ФЋЦЎАЁ 0.5mИІ СјЧрЧб ШФПЁ ЕЅРЬХЭ РњРхРЬ РкЕПРИЗЮ СЄСіЕШДй. 'Option' ЙіЦАРЛ ХЌИЏЧЯАэ Automatic Stop ХЧПЁМ Data ЖѕРЛ МБХУЧЯАэ Position-Is AboveИІ МБХУ, 0.5m ЕюРИЗЮ РдЗТЧЯИщ ФЋЦЎАЁ 0.5mИІ СјЧрЧб ШФПЁ ЕЅРЬХЭ РњРхРЬ РкЕПРИЗЮ СЄСіЕШДй.
(2) ЕЅРЬХЭ РњРхНУ Run#1, Run#2 ЕюРИЗЮ ГЊХИГЊДТ ЕЅРЬХЭ РЬИЇРЛ mh=45g#1, mh=65g#1 ЕюРИЗЮ ЙйВуСжОю ЕЅРЬХЭИІ РњРхЧиАЁИщ ГЊСпПЁ ЕЅРЬХЭИІ КаМЎЧв ЖЇ ЧрАХСњЗЎРЬ ОѓИЖРЯ ЖЇРЧ НЧЧшАЊРЮСі НБАд БИКаЧв Мі РжОю ИХПь ЦэИЎЧв АЭРЬДй. | |
[ТќАэ]
ФЋЦЎПЁ РлПыЧЯДТ ШћРЧ БзЗЁЧСДТ УГРНПЁ КИИщ СіРњКаЧи КИРЬГЊ РЬДТ Шћ ЕЅРЬХЭРЧ КЏШИІ РкММШї КИПЉСжЗСАэ ШЎДы(Е№ЦњЦЎАЊ)ЧиМ КИПЉСжДТ НКФЩРЯРЧ ЙЎСІРЬЙЧЗЮ ИЖПьНКИІ РЬПыЧЯПЉ yУр ЙќРЇИІ ХЉАдРтАэ РћДчШї РЬЕПЧиСжИщ [БзИВ11]Ањ ААРЬ ЕШДй. ШћРЧ ЦђБеАЊРК БзЗЁЧС ЛѓДм ЙкНКПЁ ГЊХИГЊДТ MeanАЊ, МвМі2ТА РкИЎБюСіИИ ЛчПыЧЯИщ ЕШДй.(ШћМОМДТ 0.03N ДмРЇЗЮ УјСЄЧЯЙЧЗЮ МвМі 3ТА РкИЎАЊРК РЧЙЬАЁ ОјДй) |
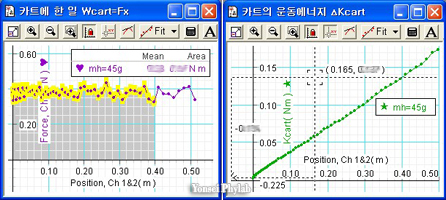 [БзИВ11] ФЋЦЎРЧ РЇФЁПЁ ЕћИЅ ШћАњ ПюЕППЁГЪСіРЧ КЏШ [БзИВ11] ФЋЦЎРЧ РЇФЁПЁ ЕћИЅ ШћАњ ПюЕППЁГЪСіРЧ КЏШ
(12) ФЋЦЎПЁ РлПыЧб ШћРЧ ЦђБеАЊ, <F>ИІ БтЗЯЧЯАэ ПђСїРЮ АХИЎИІ РгРЧЗЮ СЄЧЯПЉ Бз СіСЁБюСі АЁЧиСј РЯАњ Бз СіСЁПЁМРЧ ПюЕППЁГЪСі ЕюРЛ  НКИЖЦЎ ФПМИІ РЬПыЧЯПЉ УјСЄ(БзЗЁЧСДТ УжДыЗЮ ШЎДыЧЯПЉ РаДТ АЭРЬ РЏИЎ)ЧЯАэ МвМі 3ТАРкИЎБюСі ЕЅРЬХЭИІ БтЗЯЧбДй. НКИЖЦЎ ФПМИІ РЬПыЧЯПЉ УјСЄ(БзЗЁЧСДТ УжДыЗЮ ШЎДыЧЯПЉ РаДТ АЭРЬ РЏИЎ)ЧЯАэ МвМі 3ТАРкИЎБюСі ЕЅРЬХЭИІ БтЗЯЧбДй.
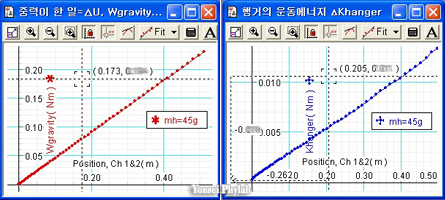 [БзИВ12] СпЗТРЬ Чб РЯАњ ЧрАХРЧ ПюЕППЁГЪСі [БзИВ12] СпЗТРЬ Чб РЯАњ ЧрАХРЧ ПюЕППЁГЪСі
[ТќАэ]
(1) НКИЖЦЎФПМИІ РЬПыЧв АцПь, ФПМЗЮ БзЗЁЧСИІ ЕћЖѓАЅ ЖЇ ОђОюСј ЕЅРЬХЭ АЊПЁ РкМЎУГЗГ КйОюМ СпАЃ АЊРЛ РаБт ОюЗЦДй. [БзИВ11]РЧ ПьУј БзИВАњ ААРЬ 0.40m РЇФЁПЁМ ПюЕППЁГЪСі АЊРЛ РаАэ НЭРЛ ЖЇ, ДйИЅ СіСЁПЁМ ЙшАцРЧ АнРкМБАњ НКИЖЦЎФПМРЧ СЁМБРЬ ИИГЊДТ yСТЧЅИІ РаРИИщ ЦэИЎЧв АЭРЬДй. НЧЧшРЛ ХыЧи ОђОюСј ЕЅРЬХЭ СЁЕщ ЛчРЬРЧ КёЗЪНФРЛ ХыЧи АшЛъЧиЕЕ ЕЧАкСіИИ НКИЖЦЎФПМДТ РЬЙЬ РкЕПРИЗЮ КёЗЪНФРЛ АшЛъЧЯПЉ Бз АЊРЛ КИПЉСжАэ РжДй.
(2) БзЗЁЧС ЕЅРЬХЭАЁ ЧЅНУЕЧСі ОЪРЛАцПь: ПЙИІЕщОю 0.5m РЬЛѓРЛ ПђСїПДДТЕЅ ГЁСіСЁРЬ БзЗЁЧСПЁ ГЊХИГЊСі ОЪРЛ АцПь x,y УрРЛ ЙйВуКИИщ ГЊХИГЊДТ АцПьАЁ РжДй. ОрАЃРЧ ЧСЗЮБзЗЅ ЙіБзЗЮ ЛчЗсЕЪ. |
(13) УјСЄЕШ АЊРИЗЮ КЮХЭ ЕЅРЬХЭИІ СЄИЎЧЯАэ ПРТї(%)ИІ АшЛъЧЯПЉ РћОю ГЛЗСАЃДй. РЯ-ПЁГЪСі РЬЗаРЧ НЧЧшРћ СѕИэРК РЬЗаАњ Рп РЯФЁЧЯДТАЁ? ИИОр, ПРТїАЁ ИЙРЬ ГДйИщ БИЧиСј ЕЅРЬХЭЗЮ КЮХЭ ФЋЦЎПЁ РлПыЧЯДТ ИЖТћЗТРЛ БИЧиКИАэ ИЖТћЗТПЁ РЧЧб РЯРЛ АшЛъЧиКИРк. ЧрАХРЧ ПюЕППЁГЪСіПЁ КёЧи ИЖТћРЯРЧ ХЉБтДТ ОѓИЖГЊ ХЋАЁ? АшРЧ ПЁГЪСі МеНЧРК ОюЖАЧб ПфРЮРЛ УЃРЛ Мі РжРЛБю? СњЗЎ 60gРЛ УпАЩРЬПЁ АЩАэ ОеРЧ НЧЧш АњСЄРЛ ЙнКЙЧЯПЉ ЕЅРЬХЭИІ БИЧЯАэ БтЗЯЧиКИРк.
|
[ЕЅРЬХЭ СЄИЎ]
1. РЯАњ ПЁГЪСі
| |
ФЋЦЎРЧ СњЗЎ(ФЋЦЎ+ШћМОМ))
Mcart(kg) |
ЧрАХ СњЗЎ
mhanger(kg) |
| 1 |
|
|
| 2 |
|
1) РЯ-ПЁГЪСі РЬЗа (The Work Energy Theorem)
-РхЗТ FПЁ РЧЧи ФЋЦЎАЁ ПђСїРЯ ЖЇ, РЇФЁПЁ ЕћИЅ ШћАњ ПюЕППЁГЪСіРЧ КЏШ
Јч Wcart: F-x БзЗЁЧС Јш Kc- x ЖЧДТ x-v БзЗЁЧС (2АГРЧ БзЗЁЧСИІ КйРЯАЭ)
| |
ФЋЦЎПЁ АЁЧиСј РЯ(NЁЄm)
(АюМБ ЧЯДмРЧ ИщРћ), Wc = <F>ЁЄx |
ПюЕППЁГЪСі КЏШ(NЁЄm),
ЅФKc = 1/2 Mcv2 |
ПРТї(%) |
| 1 |
|
|
|
| 2 |
|
|
|
2) ПЊЧаРћ ПЁГЪСі КИСИ (The Law of Conservation of Mechanical Energy)
-ЧрАХПЁ ДыЧб ЅФKh- x ЖЧДТ ЧрАХРЧ x-v (БзЗЁЧСИІ КйРЯАЭ)
| |
СпЗТПЁ РЧЧб РЯ(Nm)
Wg = mhgx (=ЅФUhanger) |
АшРЧ ПюЕППЁГЪСі КЏШ(Nm),
ЅФKT =ЅФKc +ЅФKh |
ПРТї(%) |
ПЁГЪСі МеНЧ
Ѕх = Wg-ЅФKT |
| 1 |
|
|
|
|
| 2 |
|
|
|
|
3) ЧрАХРЧ ПЁГЪСі АќТћ
Јч РЬЗаПЁ РЧЧЯИщ ЧрАХРЧ ПюЕППЁГЪСі КЏШДТ ЧрАХПЁ ДыЧб РќУМ РЯРЬ ЕЧОюОп Чв АЭРЬДй. БзЗЏГЊ ЧрАХРЧ РЇФЁПЁГЪСі КЏШДТ ЧрАХРЧ ПюЕППЁГЪСі КЏШПЭ ААСі ОЪДй.
ОеРЧ НЧЧшАсАњ АЂАЂРЧ АцПьПЁ ДыЧи РхЗТПЁ РЧЧб РЯРЛ АшЛъЧи КИАэ АЂАЂРЧ АцПьПЁ СйРЧ РхЗТРЛ АшЛъЧиКИРк. АшЛъЕШ АЊРК ФЋЦЎЛѓРЧ ШћМОМПЁ РЧЧи УјСЄЕЧДТ ЦђБе РхЗТАњ ААРКАЁ?
| |
ЧрАХПЁ АЁЧиСј РЯ,
WTh = ЅФKhanger |
СпЗТПЁ РЧЧб РЯ,
Wg = mhgx |
РхЗТПЁ РЧЧб РЯ
WTension= Wg-WTh |
ЧрАХПЁ РлПыЧЯДТ РхЗТ, T
(Wg-WTh)/x |
ПРТї(%)
<F>ПЭРЧ ПРТї |
| 1 |
|
|
|
|
|
| 2 |
|
|
|
|
|
Јш ЧрАХРЧ МіСїПюЕППЁМ РхЗТПЁ РЧЧб РЯРК + РЮАЁ, -РЮАЁ? БзРЬРЏДТ? АшРЧ РќЙнРћРЮ ПюЕПОчЛѓАњ ПЁГЪСі КЏШИІ МГИэЧиКИРк. |
5. Тќ Аэ
(1) Work and Energy (PDF ЦФРЯ)
(2) ШИРќМОМ(RMS) / ШћМОМ(Force Sensor)
|
|


 НЧЧшНЧМвАГ
НЧЧшНЧМвАГ БЙСІФЗЦлНК
БЙСІФЗЦлНК



 1.
1. СпЗТРЬ Чб РЯ, Wgravity
СпЗТРЬ Чб РЯ, Wgravity
